Jupyter notebook implementations can be found here
Efficient Cavity Control with SNAP Gates¶
This tutorial reproduces part of Thomas Fösel et al. (2020), titled Efficient cavity control with SNAP gates. The general idea is to start in an initial state and apply a sequence of operators to reach the desired target state.
In the paper, the authors use a vacuum state, \(|0 \rangle\), with a Hilbert space cutoff of 10.
Authors apply sequence of operators as blocks, \(\hat{B}\), where
In the equation above, \(D(\alpha)\) is a Displace operation given by
where \(\alpha\) is the complex displacement parameter, and \(a^{\dagger}\) and \(\hat a\) are the bosonic creation and annihilation operators respectively.
\(S(\vec \theta)\) in the block definition of \(\hat{B}\) above is the selective number-dependent-snap arbitrary phase (SNAP) gate defined as
where \(\vec{\theta}\) is the real vector containing SNAP parameters, and \(|n\rangle\) is the number state.
With the operator definitions laid out, the idea now is to apply this sequence of \(D(\alpha)\), \(S(\vec{\theta})\), and \(D(\alpha)^{\dagger}\) operations to \(|0 \rangle\), in order to reach the target binomial state, which in this case is
Note: We do not follow the exact same scheme as used in Thomas Fösel et al. (2020), in that we use a simpler cost function (without regularization) and do not add blocks in a Breadth-First manner.
[1]:
import numpy as onp # this is ordinary numpy that we will
# use with QuTiP for visualization only.
# onp should not used for gradient
# calculations. Instead jax.numpy
# should be used.
import jax.numpy as jnp
from jax import grad, jit
from jax.experimental import optimizers
# Visualization
import matplotlib.pyplot as plt
from qutip.visualization import plot_wigner, hinton
from qutip import Qobj # imported purely for visualization purposes due to QuTiP-JAX non-compatibility
from qgrad.qgrad_qutip import basis, to_dm, dag, Displace, fidelity
from tqdm.auto import tqdm
[2]:
def pad_thetas(hilbert_size, thetas):
"""
Pads zeros to the end of a theta vector to
fill it upto the Hilbert space cutoff.
Args:
hilbert_size (int): Size of the hilbert space
thetas (:obj:`jnp.ndarray`): List of angles thetas
Returns:
:obj:`jnp.ndarray`: List of angles padded with zeros
in place of Hilbert space cutoff
"""
if len(thetas) != hilbert_size:
thetas = jnp.pad(thetas, (0, hilbert_size - len(thetas)), mode="constant")
return thetas
def snap(hilbert_size, thetas):
"""
Constructs the matrix for a SNAP gate operation
that can be applied to a state.
Args:
hilbert_size (int): Hilbert space cuttoff
thetas (:obj:`jnp.ndarray`): A vector of theta values to
apply SNAP operation
Returns:
:obj:`jnp.ndarray`: matrix representing the SNAP gate
"""
op = 0 * jnp.eye(hilbert_size)
for i, theta in enumerate(thetas):
op += jnp.exp(1j * theta) * to_dm(basis(hilbert_size, i))
return op
Insertion of Blocks¶
\(T\) number of displace-snap-displace blocks, \(\hat B = D(\alpha) \hat S(\vec \theta) D(\alpha)^{\dagger}\) are applied on the initial vacuum state, \(|0 \rangle\)
In this reconstruction we choose \(T = 3\), so \(3\) \(\hat B\)’s are applied to the initial state. The aim is to tune \(\alpha\)’s and \(\vec{\theta}\)’s such that three repeated applications of \(\hat B\) on \(|0 \rangle\)
lead to the desired binomial state \(b_{1}\)
Note on Displace operator: We provide a fast implementation of the displacement operation using a diagonal decomposition such that a Displace class initialises the operator which can then be applied for different \(\alpha\) repeatedly. This construct also supports autodiff with JAX.
[3]:
def apply_blocks(alphas, thetas, initial_state):
"""Applies blocks of displace-snap-displace
operators to the initial state.
Args:
alphas (list): list of alpha paramters
for the Displace operation
thetas (list): vector of thetas for the
SNAP operation
initial_state(:obj:`jnp.array`): initial
state to apply the blocks on
Returns:
:obj:`jnp.array`: evolved state after
applying T blocks to the initial
state
"""
if len(alphas) != len(thetas):
raise ValueError("The number of alphas and theta vectors should be same")
N = initial_state.shape[0]
displace = Displace(N)
x = initial_state
for t in range(len(alphas)):
x = jnp.dot(displace(alphas[t]), x)
x = jnp.dot(snap(N, thetas[t]), x)
x = jnp.dot(displace(-alphas[t]), x) # displace(alpha)^{\dagger} = displace(-alpha)
return x
Visualizing the state evolution under \(\hat B\)¶
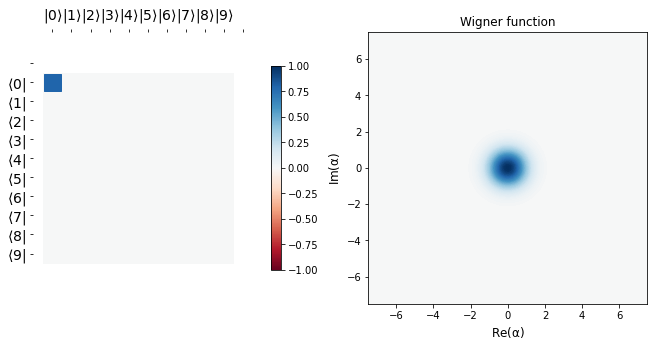
Before we move on to make learning routines, it might be a good idea to see what apply_blocks does to the initial state, \(|0 \rangle\) with randomly initialized parameters \(\alpha\) and \(\vec{\theta}\)
[4]:
def show_state(state):
"""Shows the Hinton plot and Wigner function for the state"""
fig, ax = plt.subplots(1, 2, figsize=(11, 5))
if state.shape[1] == 1: # State is a ket
dm = Qobj(onp.array(jnp.dot(state, dag(state))))
hinton(dm, ax=ax[0])
plot_wigner(dm, ax=ax[1])
plt.show()
N = 10 # Hilbert space cutoff
initial_state = basis(N, 0) # initial vacuum state
show_state(initial_state)
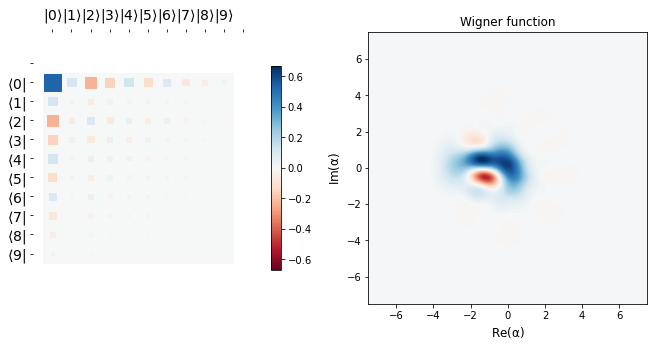
alphas = jnp.array([1., 0.5, 1.]) # Displace parameters
theta1, theta2, theta3 = [0.5], [0.5, 1.5, 0.5], [0.5, 1.5, 0.5, 1.3] # SNAP parameters
# NOTE: No input values to JAX differentiable functions should be int
thetas = jnp.array([pad_thetas(N, p) for p in [theta1, theta2, theta3]])
evolved_state = apply_blocks(alphas, thetas, initial_state)
show_state(evolved_state)
/home/asad/anaconda3/lib/python3.6/site-packages/jax/lib/xla_bridge.py:130: UserWarning: No GPU/TPU found, falling back to CPU.
warnings.warn('No GPU/TPU found, falling back to CPU.')
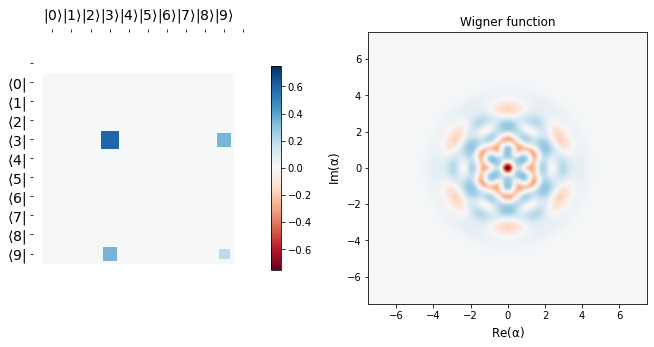
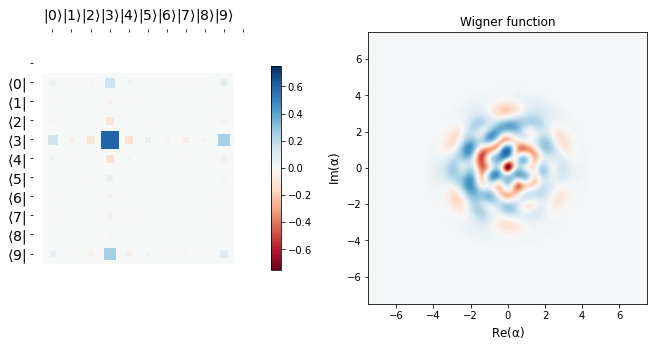
The target state that we aim to reach is visualized below. The aim is to act apply_blocks function to the initial state with the optimized parameters, say \(\alpha_{opt}\) and \(\theta_{opt}\) such that we land extremely close to the desired binomial state \(b_{1}\) as defined above.
[5]:
target_state = (jnp.sqrt(3) * basis(N, 3) + basis(N, 9)) / 2.0 # target state b1 as shown above|
show_state(target_state)
[6]:
def cost(params, initial, target):
"""
Calculates the cost between the target state and
the one evolved by the action of three blocks.
Args:
-----
params (jnp.array): alpha and theta params of Displace and SNAP respectively
initial (jnp.array): initial state to apply the blocks on
target (jnp.array): desired state
Returns:
--------
cost (float): cost at a particular parameter vector
"""
alphas, thetas = params[0], params[1]
evo = apply_blocks(alphas, thetas, initial)
return 1 - fidelity(target, evo)[0][0]
Optimization using Adam – case in point for qgrad¶
This is where the power of qgrad comes in. Since qgrad’s functions used in this notebook – basis, to_dm, dag, Displace, fidelity – support JAX, we can evaluate the gradient of the cost function in one line using JAX’s grad. This saves us painstakingly evaluating the derivative of the cost function analytically.
[7]:
alphas = jnp.array([1, 0.2, 0.1 - 1j]) # Displace parameters
theta1, theta2, theta3 = ([0.5],
[0., 0.5],
[0.1, 0., 0., 0.1])
# NOTE: No input values to JAX differentiable functions should be int
thetas = jnp.array([pad_thetas(N, p) for p in [theta1, theta2, theta3]])
init_params = [alphas, thetas]
opt_init, opt_update, get_params = optimizers.adam(step_size=1e-2)
opt_state = opt_init([alphas, thetas])
def step(i, opt_state, opt_update):
params = get_params(opt_state)
g = grad(cost)(params, initial_state, target_state)
return opt_update(i, g, opt_state)
epochs = 150
pbar = tqdm(range(epochs))
fidel_hist = []
params_hist = []
for i in pbar:
opt_state = step(i, opt_state, opt_update)
params = get_params(opt_state)
params_hist.append(params)
f = 1 - cost(params, initial_state, target_state)
fidel_hist.append(f)
pbar.set_description("Fidelity {}".format(f))
[8]:
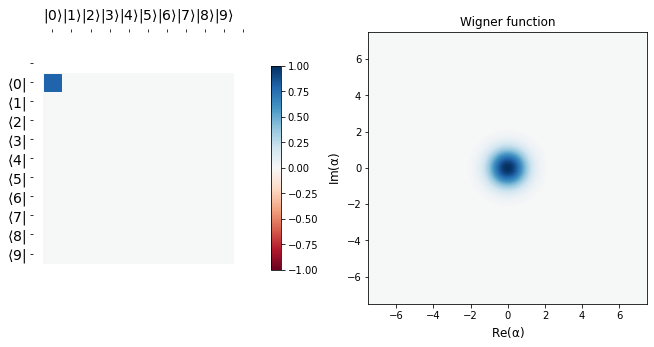
def display_evolution(parameters, num_plots = 4):
"""
Displays the intermediate states during the learning schedule.
Args:
parameters (list): List of device arrays of parameters
`alpha` and `theta`
num_plots (int): Number of plots to make generate (except
the initial and final state plots)
Returns:
Evolution of the state at `num_plots` equidistant
times during the training
"""
show_state(initial_state)
diff = epochs // int(num_plots)
for i in range(0, epochs, diff):
alphas, thetas = parameters[i]
x = apply_blocks(alphas, thetas, initial_state)
show_state(x)
# final parameters after last epoch
alphas, thetas = parameters[-1]
x = apply_blocks(alphas, thetas, initial_state)
show_state(x)
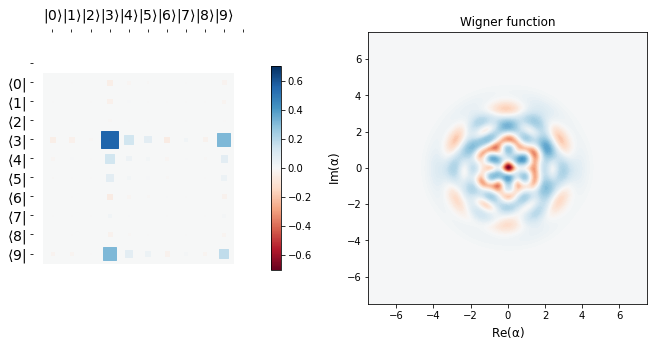
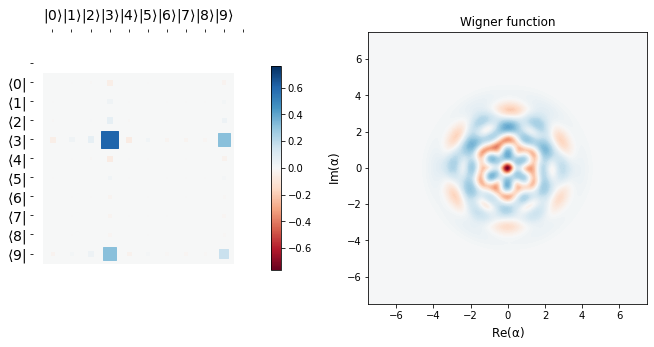
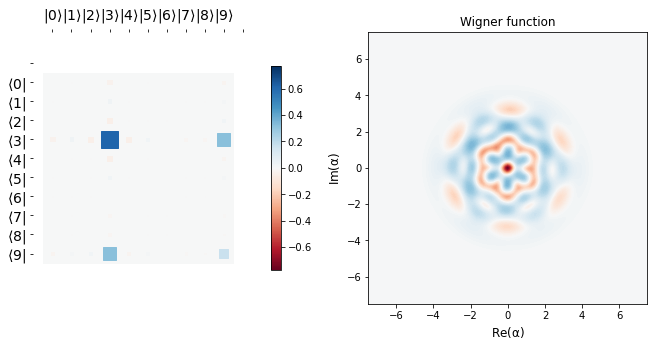
display_evolution(params_hist)


Conclusion¶
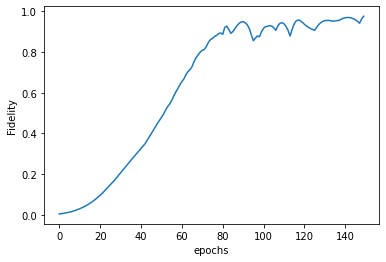
We see that starting from a vacuum state \(|0 \rangle\), we efficiently learn the target state \(b_{1} = \frac{\sqrt 3 |3> + |9>}{2}\), as is corroborated by the fidelity plot below.
The desired target state’s Hinton plot and Wigner function are shown before the learning scedule starts. It can be seen that the last row above is almost the same as the target state, implying we learn parameters \(\alpha\) and \(\vec \theta\) efficiently so as to go from the vacuum state to a desired target state in just three applications of blocks, \(\hat B\). This tutorial is just meant to show the usage of qgrad. Like the authors in the original paper, one may use more
sophistacated techniques like gradient clipping, regularized cost function, and greater number of epochs to achieve even better learning.
[9]:
plt.plot(fidel_hist)
plt.ylabel("Fidelity")
plt.xlabel("epochs")
[9]:
Text(0.5, 0, 'epochs')
References¶
[1] Fösel, Thomas, et al. “Efficient cavity control with SNAP gates.” arXiv preprint arXiv:2004.14256 (2020).